Let’s consider a system – say, my car – that works perfectly when it is new. It has no design flaws. It goes on working for some considerable time, and then some part breaks. The car now has a problem, a fault, that should be repaired by replacing the broken part. But, I don’t yet know there is a fault.
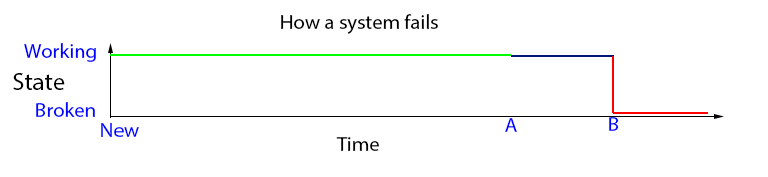
In the chart, the part breaks at time A. But I don’t recognise there is a problem, because I’ve not yet noticed anything wrong. As far as I am concerned, the car is still working fine. The blue line on the chart represents this period. Eventually, though, the broken part causes an error that I can detect. In my case, the engine stopped when I expected it to be rotating. The red line represents this event, which occurred at time B, some time after time A.
I then realise that the car has a fault. However, I don’t get it fixed straight away, so the car goes on being faulty for some while – the horizontal part of the red line. I can still get the car to start, and drive it around – carefully – but I know it is broken.
In order to know that there is a fault, I need to be able to detect an error, and I won’t be able to do that until the fault is exercised to produce an error I can notice. A fault which isn’t exercised doesn’t produce any errors.
A car headlamp bulb is a good example of a fault that’s not detected until it’s exercised. The bulb can break any time, when the lamp is on or off. When the headlights are switched off, even if there is a broken bulb, there is no error. I’ll not know until I switch on the lights – of course, when it’s dark and I really need it. That’s when I exercise the fault to produce an error, the lamp not producing light when I expect it to.